| 
|

| 
|

| 
|

| 
|

| 
|
| 
|

| 
|


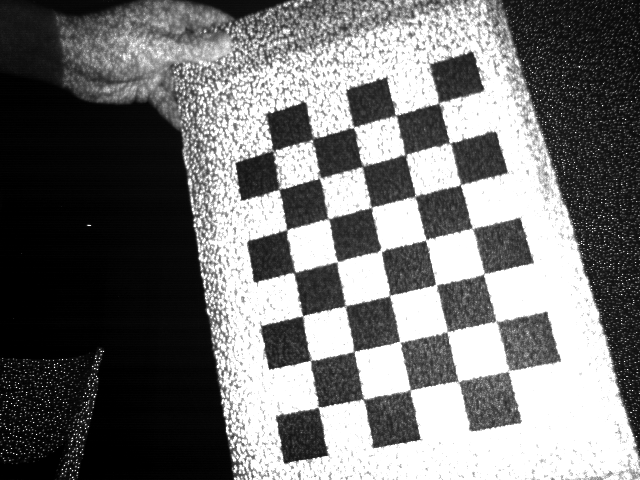
The extrinsic matrices for RGB camera is:
42.92 73.12 316.15 -2.00 2.06 0.42
63.21 -48.93 319.51 -0.02 3.03 0.24
57.10 -36.59 366.05 -0.06 2.51 -0.29
39.41 -72.19 361.86 0.63 2.60 -0.16
-31.39 -55.33 219.10 -1.73 -2.10 -0.78
42.52 15.09 495.30 0.25 3.07 -0.03
47.00 -92.77 482.56 1.44 2.23 -0.59
The intrinsic matrices for RGB camera is:
524.10 0 312.14
0 524.91 249.84
0 0 1
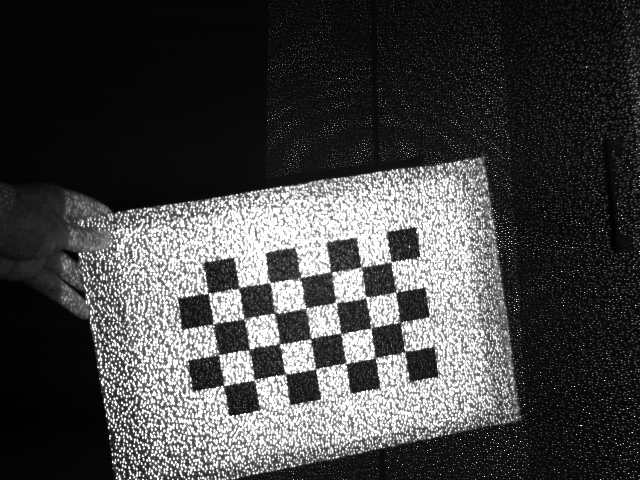
The extrinsic matrices for IR camera is :
58.14 75.58 330.03 -1.99 2.04 0.40
80.93 -46.85 333.38 -0.03 3.00 0.26
72.56 -34.45 379.79 -0.05 2.48 -0.30
54.01 -68.20 381.87 0.63 2.56 -0.17
-12.85 -54.56 230.66 -1.74 -2.11 -0.80
54.45 16.40 518.28 0.25 3.02 0.02
57.72 -92.78 502.68 1.45 2.19 -0.57
The intrinsic matrices for RGB camera is:
612.32 0 326.70
0 614.54 242.53
0 0 1
Further calculation of mapping RGB to IR camera will be applied.